Us personally
We've had a busy January. The entire Manuvr team is now in the San Francisco Bay area. Josh and I are now working full-time on Manuvr and related technologies for a major telecom company that will likely be the first deployment-at-scale, and who has agreed to keep their efforts open-source, and developer friendly. That will warrant a separate in-depth post once they clear us to release details.
We're very excited about our prospects of unifying some of the fractured landscape of standards, transports, protocols, and hardware; something the IoT realm sorely needs.
ManuvrOS
For my part, I've been hard at work debugging threading Manuvr's firmware under different threading models and imparting concurrency safety. I've made builds with both FreeRTOS on the Teensy3.1, and pthreads on linux. At present, the pthreads version is much more complete, but once I resolve a few more library congruency mis-matches the two threading models can be coded for against the same API.
Digitabulum
Digitabulum has sat idle for the past few months as time was devoted to ManuvrOS and MHB. But that is changing as-of yesterday. We are back in communication with our fabricator, and they are eager to help us build the digit sensor circuits. The 3rd draft of the hardware has been sent to them for feasibility opinions. Realistically, we are probably 3 months away from having the full sensor package for r1 built, funds permitting.
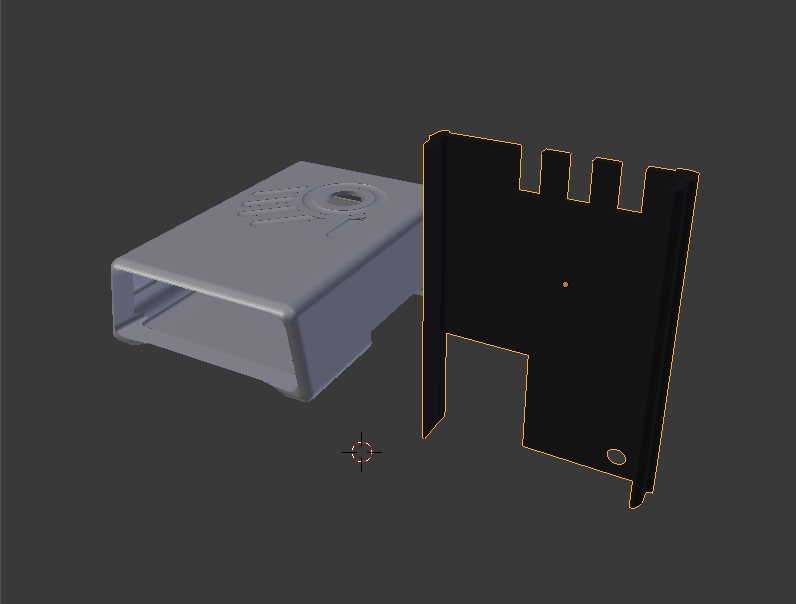
The non-circuit hardware tasks have also been advancing in the past few months. Here are some renders of the casing parts...
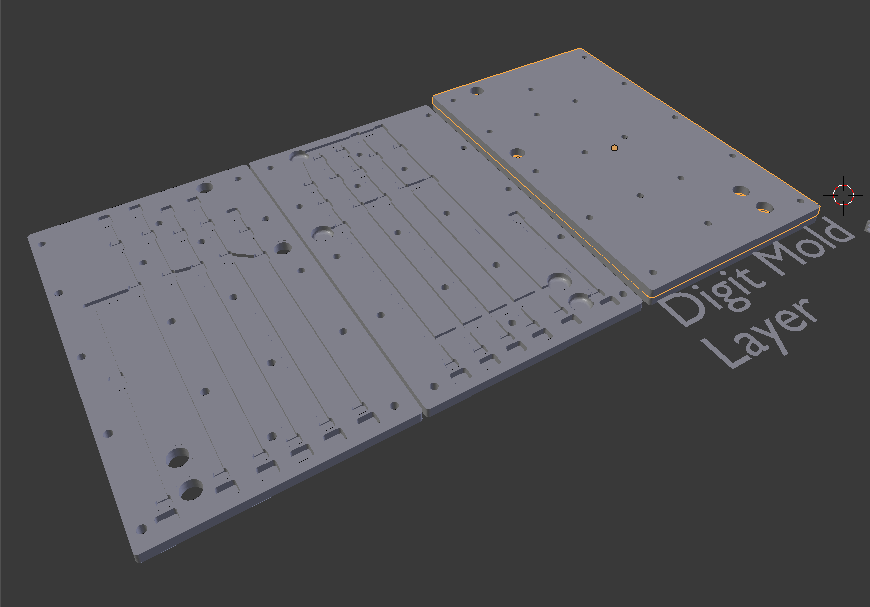
...and the digit mold for the sensor package...
Major changes are underway. But we are still alive, and the project is still making steady progress. More to come!